
Sinyal Döngüsü Nedir?
.
Bir kavşaktaki tüm sinyallerin kendini tekrar ederek yanmaya başlamadan önceki tamamladığı bir tam tura sinyal döngüsü denir. Sinyal döngüsü kavşakta her yöne sırasıyla geçiş hakkının sağlandığı saniye cinsinden tur uzunluğudur.
.
Sinyal Döngüsünün Belirlenmesi
.
Döngü süresinin belirlenmesinin amacı, araçlar için gecikmenin en aza indirilmesi ve sinyalize kavşaklarda verimli bir performansın sağlanmasıdır [1].
.
Sabit zamanlı çalışan kavşaklarda sinyallerle verilen herhangi bir trafik akışı durumda, döngü süresi kavşaktan geçen araçların ortalama gecikmesini etkilemektedir. Döngü süresinin çok kısa olduğu durumlarda, yeşiller arası periyottaki kayıp zamanın ve başlangıç gecikmelerinin işgal ettiği döngü süresine oranının yüksek olması sinyal kontrolünün yetersiz kalmasına ve uzun gecikmelere neden olmaktadır. Döngü süresi uzun olduğunda ise bekleyen araçlar yeşil süresinin ilk saniyelerinde kavşağı boşaltır, yeşil süresinin son kısmında durma çizgisinden geçen araçlar geniş aralıklarla gelen araçlar olmaktadır [2]. Ayrıca her bir koldaki araç bekleme süresi artacaktır. Bu nedenle optimum periyot süresinin tayini minimum gecikme ve minimum toplam kayıp süre yönünden önemlidir [3].
.
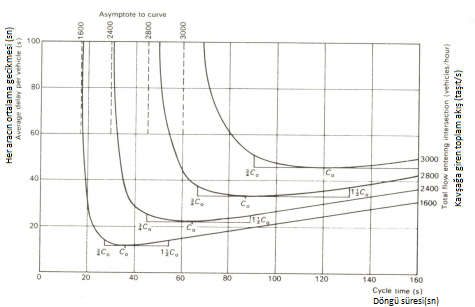
Highway Capacity Manual (HCM), toplam kayıp süre için her fazda 4 saniyelik varsayılan bir değer tanımlar [4].
.
Şekil 1 Kayıp zamanın optimal döngü uzunluğu üzerine etkisi [5]
.
Bir sinyalize kavşakta döngü süresi hesaplarken:
.
- Kavşağın geometrik özellikleri,
- Seçilen faz düzeni ve
- Trafik koşullarını göz önünde bulundurmak önemlidir.
.
Sinyal döngüsü genellikle 60 ile gecikmeyi ve sürücü sabırsızlığını azaltmak için maksimum 120 saniye arasındadır. Ancak çok özel şartlar haricinde periyodun 60 ile 80 saniye arasında seçilmesi genellikle uygun olmaktadır [3].
.
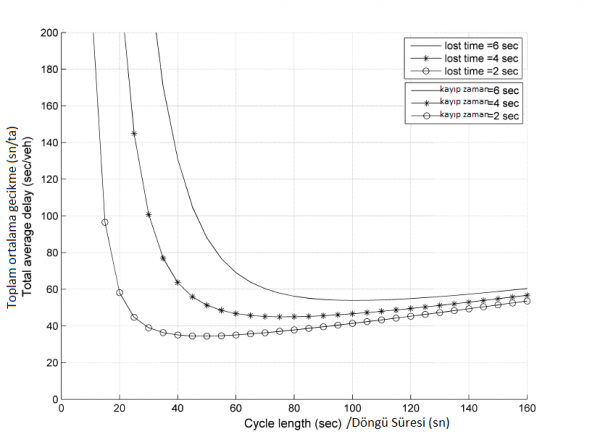
Şekil 2 Döngü Süresi Değişiminin Gecikmeye Etkisi [2]
.
Devre süresinin hesaplanabilmesi için birçok yöntem bulunmaktadır. Bunun nedeni, taşıt özellikleri ile yaya ve sürücü davranışlarının kesin teorilere bağlanamamış olmasıdır. Herhangi bir devre süresi, kullanılan yöntem ve uygulanan sistem ne olursa olsun, prensip bakımından iki bileşkeden oluşur [4]:
.
- Taşıt akımları için ayrılan yeşil süreler toplamı,
- Kayıp zaman
.
Manuel Yöntem
Los Angeles, ABD
.
Trafik sinyal ağındaki döngü uzunluklarını belirlemek için manuel metod ilk olarak Los Angeles’ta geliştirilmiştir. Şehir grid dokuya sahip olduğu için basit trafik sinyal zaman stratejisi kullanılmıştır ve 60 saniyelik döngü süresi ve 30 mil (~50km/s) hızla 2 yönlü koordinasyon sistemi oluşturulmuştur [4].
.
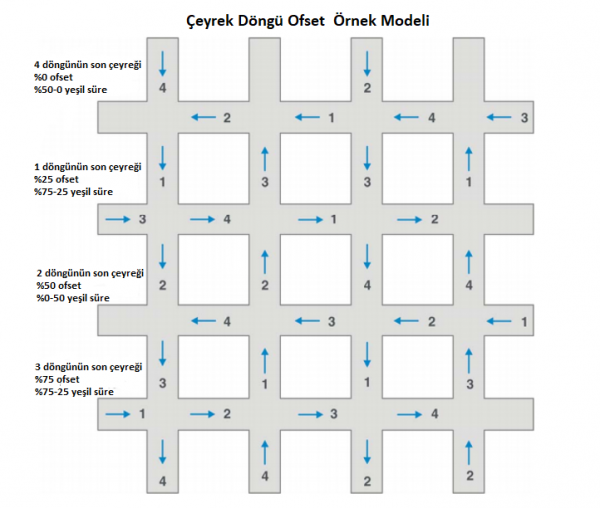
Şekil 3 Manuel Yöntem ile kavşak sistemi [5]
.
Harmonik Döngü Uzunluğu Yöntemi
Harris County, Texas, ABD
.
Bazı birimler kavşak aralığı, sinyal fazlaması, seyahat hızları ve yaya geçidi gereksinimlerine göre çeşitli sokak tipleri için sabit döngü uzunlukları belirlemiştir [4].
.
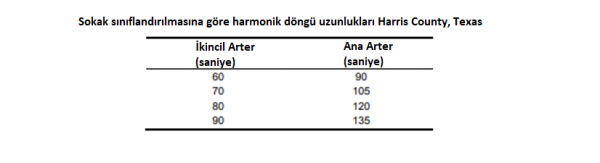
Şekil 4 Arter sınıflandırılmasına göre harmonik döngü uzunluğu [5]
KAYNAKÇA
[1] Al-Kubaisi, M. (2012). Optimum Cycle Time Prediction for Signalized Intersections at Baghdad City. Çankaya Üniversitesi Bilim Ve Mühendislik Dergisi, 9(2).
[2] Salter, R. (1996). Optimum cycle times for an intersection. Highway Traffic Analysis and Design (pp. 304-310). London: Palgrave.
[3] Yılmaz, E.i Köse, C. Dört Kavşağa Sahip Bir Karayolu Bölümünün Bilgisayar Ortamında Simülasyonu. Karadeniz Teknik Üniversitesi.
[4] Koonce, P., & Rodegerdts, L. (2008). Traffic signal timing manual. [Washington, D.C.]: U.S. Dept. of Transportation, Federal Highway Administration.
[5] Zakariya, A., & Rabia, S. (2016). Estimating the minimum delay optimal cycle length based on a time-dependent delay formula. Alexandria Engineering Journal, 55(3), 2509-2514. doi: 10.1016/j.aej.2016.07.029